
Introduction
The acoustic test system AMADEUS (ANTARES Modules for the Acoustic Detection Under the Sea) was an integral part of the ANTARES neutrino telescope and recorded data from 2008 to 2015. It comprised 36 acoustic sensors, installed at water depths between 2050 and 2300 m, employing piezo-electric elements for the broad-band recording of signals with frequencies of 2~100 kHz.
The design purpose of AMADEUS was a feasibility study towards the acoustic detection of neutrinos with energies near and above 1018 eV in sea water.
Its unique feature of continuously streaming acoustic data to shore for a long period of time has also made it a valuable instrument for marine science.
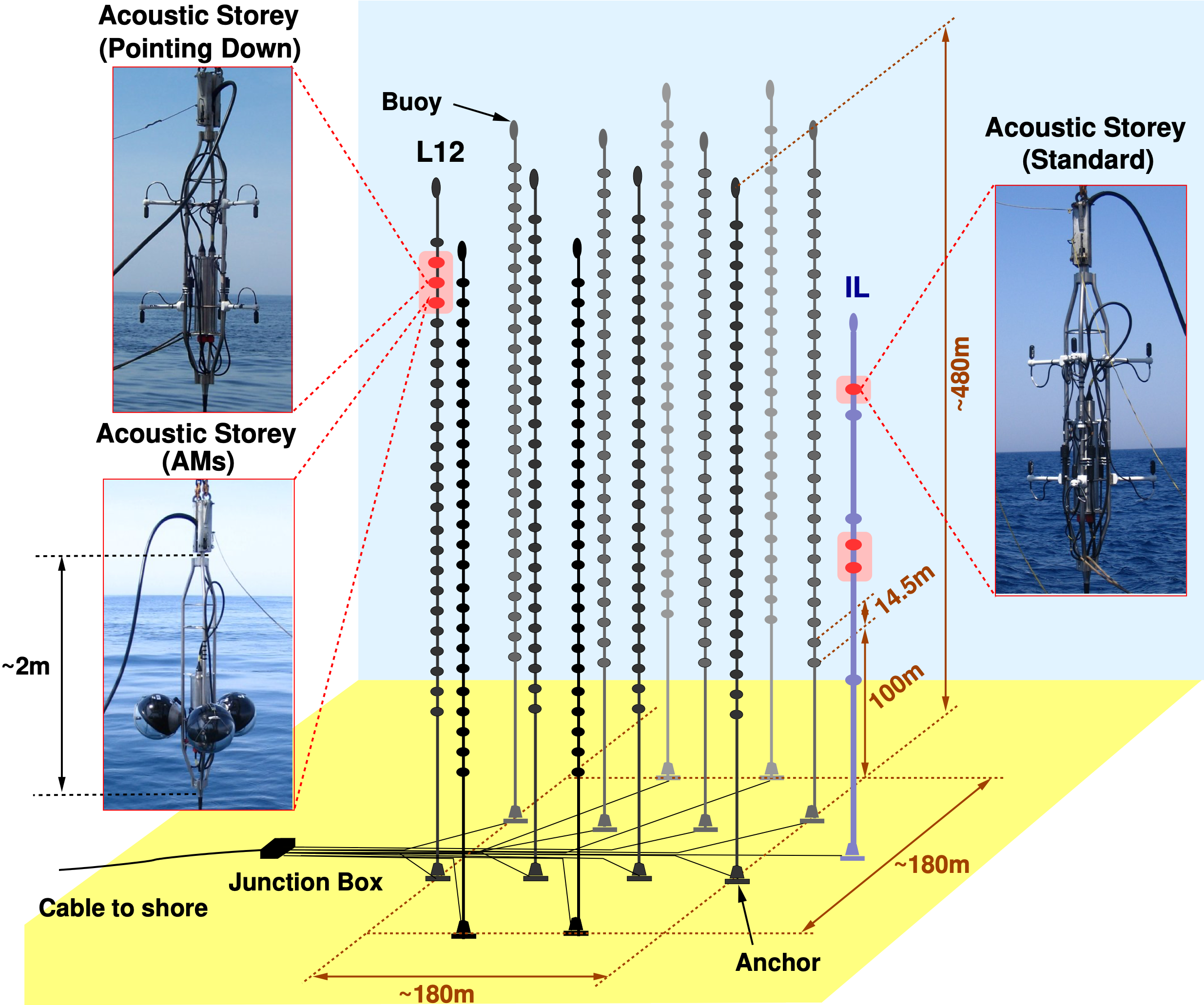
The graphic shows the design of AMADEUS within the ANTARES detector. A total of six “acoustic storeys”, each one equipped with six channels, were installed on the “Instrumentation Line” (IL in the graphic) and in the top part of one of the standard lines (L12 in the graphic).
The timeline shows the periods during which the acoustic storeys on the respective lines were active (green) or not operational (red).

Acoustic storeys 2, 3, 6 on IL



Acoustic storeys 21, 22, 23 on L12



- Direction reconstruction of transient sources
- Ambient noise and environmental conditions
- Acoustic neutrino detection
- Technical specifications
- AMADEUS data
Direction reconstruction of transient sources
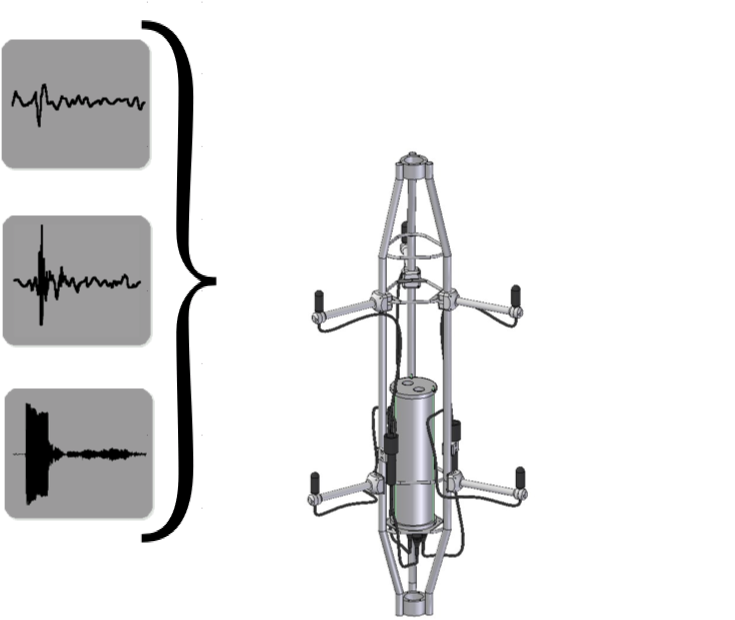
Each direction of an incoming planar wave, characterised by azimuthal angle 𝜑 and polar angles 𝜃, results in a specific sequence of the arrival times in the six sensors of an acoustic storey. In the heat map, from the measured time-of-arrival for each sensor the expected time-of-arrival for a given direction of the incoming wave is subtracted and the waveforms are stacked. For the correct direction, the signals of all sensors superimpose at t=0
![]()
![]()
![]()
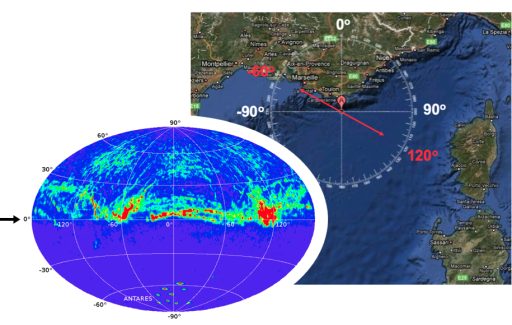
AMADEUS – source direction distribution
Direction reconstruction for one storey over a period of several days. All types of transient signals (ANTARES position calibration emissions, sea mammals, ships etc.) are shown. The origin points North to the horizon. The directions of -60o and 120o which show high acoustic intensity, correspond to the directions of Marseille and Ajaccio, respectively.
Ambient noise and environmental conditions
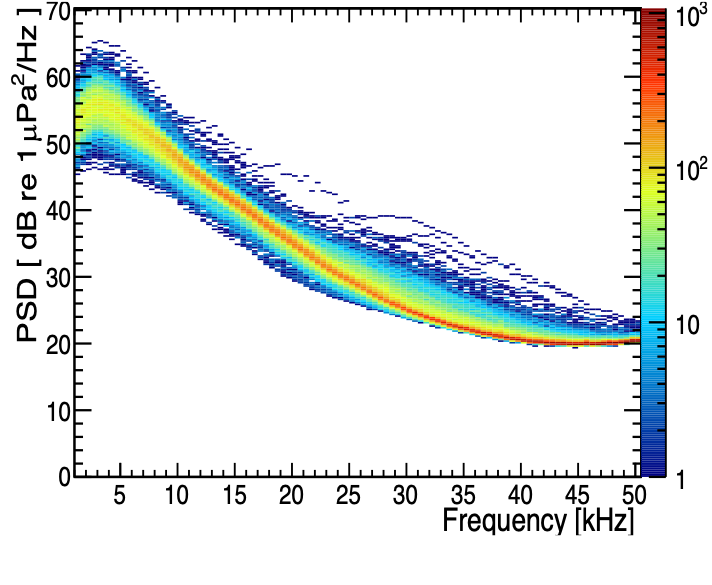
Ambient noise is broadband with a characteristic spectrum. It is mostly due to environmental processes (wind, precipitation, mainly coming from the surface) at intermediate frequencies (≲ 50 kHz) and molecular agitation at high frequencies (≳ 100 kHz). In addition, intrinsic noise of the electronics of each acoustic sensor is present. Shipping traffic, which in principle is a source of transient sound signals, also produces broadband noise that prevails over long time ranges. It therefore can be considered a contribution to the ambient noise despite of the directivity of its emission. The analysis of ambient noise therefore can provide insights into the environmental conditions and the intensity of anthropogenic noise in a radius of tens of kilometres around the detector.
The plots demonstrate the ambient noise for different sea states; the color indicates the number of entries per bin.
Sea State 1 (Wind: 4 kn – 6 kn) Sea State 3 (Wind: 11 kn – 16 kn)
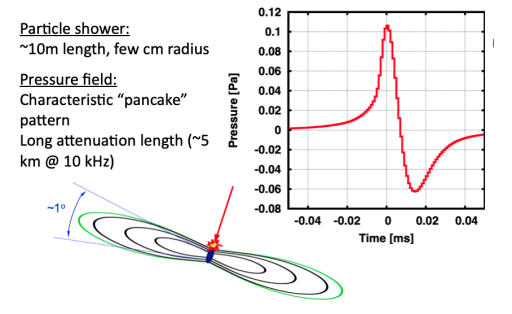
Acoustic neutrino detection is a technique for the detection of neutrinos with energies near and above 1018 eV and is based on the thermoacoustic model. According to this model, the energy deposition of particles traversing liquids leads to a local heating of the medium which can be regarded as instantaneous with respect to the hydrodynamic time scales. Due to the temperature change, the medium expands or contracts according to its bulk volume expansion coefficient. The accelerated motion of the heated medium generates an ultrasonic pulse whose temporal signature is bipolar and which propagates in the volume. Coherent superposition of the elementary sound waves, produced over the cylindrical volume of the energy deposition, leads to a propagation within a flat disk-like volume in the direction perpendicular to the axis of the particle shower.
To asses the feasibility of acoustic neutrino detection in the deep sea, investigation with AMADEUS focussed on the study of ambient noise and transient background.
Ambient noise is broadband with a characteristic spectrum, in the frequency range of interest mainly caused by environmental processes (wind, precipitation, mainly coming from the surface) [see Ambient noise]. It determines the minimum pulse height that can be measured, if a given signal-to-noise ratio (SNR) can be achieved with a search algorithm.
The noise was shown to be very stable [ICRC 2011] and based on a SNR of about 2, an energy threshold for neutrino detection of ~1 EeV can be estimated ([see ANTARES ICRC 2011 contribution 22 ]). Hence, to reduce the threshold to about 100 TeV, a trigger based on the combined signals from 100 sensors would be necessary. It is clear that this requires detectors of large size with significant computing power.
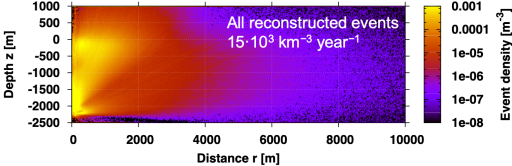
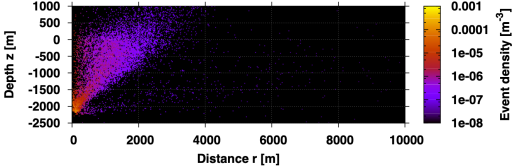
Pulses of short duration are mostly due to marine mammals, in particular dolphins, and shipping traffic. Dolphins emit pulses with very similar characteristics in the time and frequency domain to the bipolar pulses expected from neutrino interactions. This background can be reduced to a large degree by cutting on the origin of the signal (the surface) and on the temporal and spatial clustering of events. This is demonstrated below .
Further reduction again requires a larger detector with sensors distributed over a volume that would allow for the reconstruction of the “acoustic pancake”.
Cluster Analysis of Moving Sound Emitting Objects
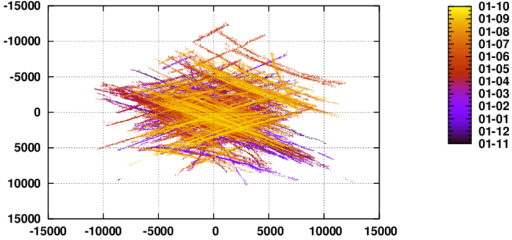
Spatial Distribution of Transient Background
AMADEUS technical specifications
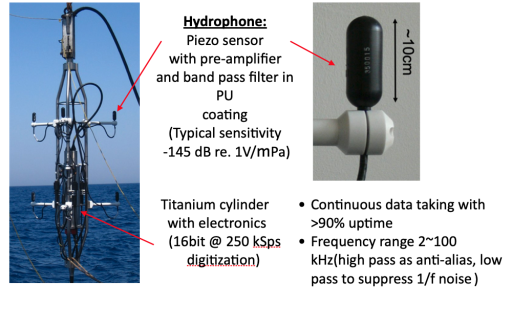
The acoustic storey 21 on line 12 contains so-called ”acoustic modules” in which the sensors are glued directly to the glass hemisphere [see Ph.D. C. Naumann’s dissertation on ANTARES]
This approach has been adopted for the acoustic position calibration for KM3NeT

AMADEUS recorded data from 2008 to 2015 in two trigger modes:
- Minimum bias mode:
10 seconds of continuous data were recorded once per hour - Triggered mode:
Signals selected with an amplitude above a pre-defined threshold or selected by a pulse shape recognition trigger, based on a cross correlation with a bipolar pulse.
Timing: The ANTARES timing system provides the GPS time of a run start and the relative time of (optical) events w.r.t. the run start with sub-nanosecond precision. For acoustic data, the required precision is much lower (speed of sound in water about 1500 m/s) and differs between the sensors on different storeys by about 1 𝜇s .
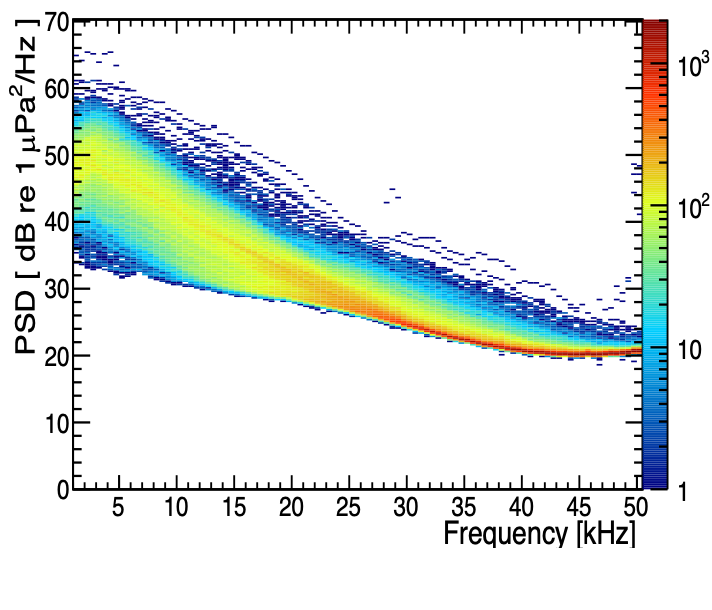
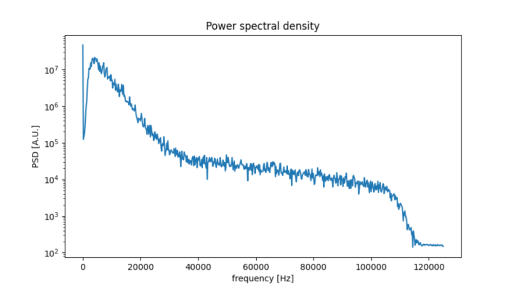
A sample power spectral density for a hydrophone on floor 22 of Line 12 is shown below.
The effect of the bandpass filter from 2~100 kHz is visible. The spike at zero frequency is due to an offset between the reference voltages of the analog amplifier system and the ADC.
At frequencies exceeding 40~50 kHz, the power spectral density is dominated by electronic noise, see here].
The AMADEUS data are accessible to the public under certain conditions. Please contact robert.lahmann@fau.de for information